


SPACEYE

SPACEYE
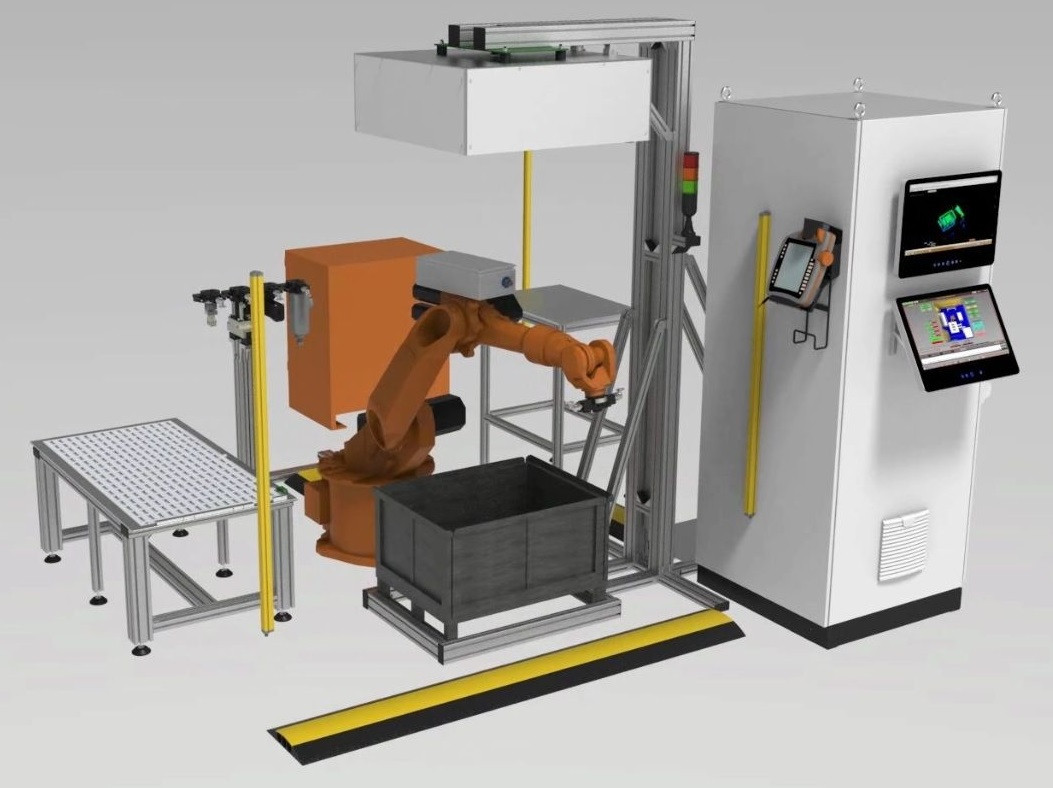
SPACEYE je integrované robotické pracovisko, ktorého funkciou je plne automatické a adaptívne riadenie robotických manipulátorov v integrácii s trojrozmerným 3D robotickým videním.
Pracovisko obsahuje patentovaný modul robotického videnia pre real-time spracovanie 3D priestoru s plne automatickým výmenníkom uchopovacích systémov a plánovaním trajektórie robotického manipulátora.
Systém slúži pre priemyselné využitie v oblasti depaletizácie, teda automatizovaného vykladania náhodne usporiadaných predmetov z palety / krabice. Jeho úlohou je vytvorenie 3D modelu daného predmetu, zosnímanie palety / pracovného priestoru a určenie pozície a natočenie predmetu. Tieto informácie následne slúžia manipulátoru pre správne uchopenie a premiestnenie daného objektu.
Funkcie
- Registrácia vyhľadávaného modelu
- Získanie mraku bodov (point cloud) z hľadanej oblasti
- Programové vyhľadanie registrovaného modelu v pracovnom priestore
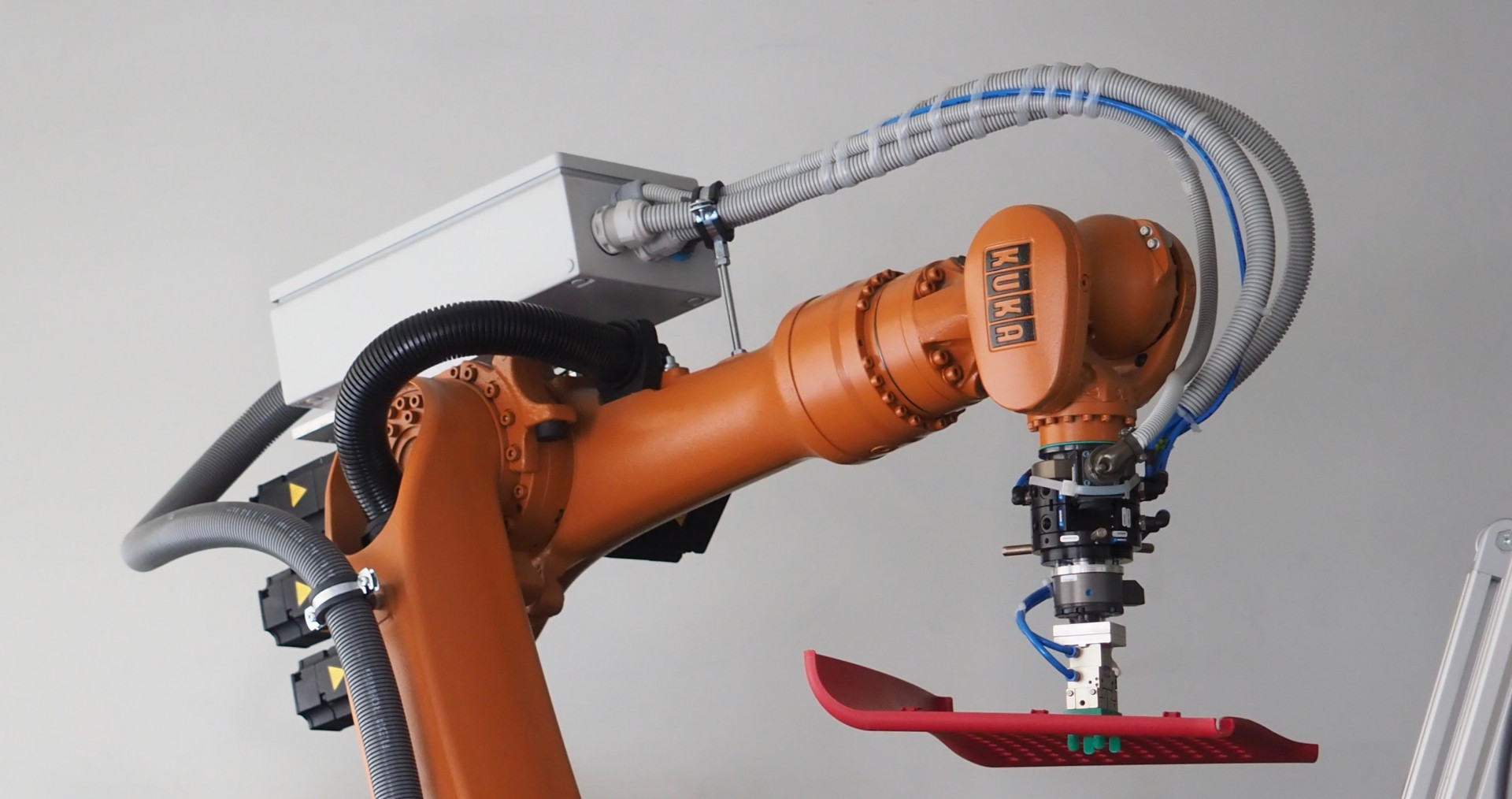
- Pozícia a natočenie modelu v 3D priestore s určeným miestom pre uchopenie objektu pomocou robotického manipulátora a jeho umiestnenie do požadovaného priestoru
- Automatické generovanie trajektórie robotického manipulátora pre spoľahlivé a bezpečné uchopenie a vyloženie