Contact person:
Ing. Zdenko Hušek, zdenko.husek@mdj.sk, +421 948 376 665
Description of functions/solutions
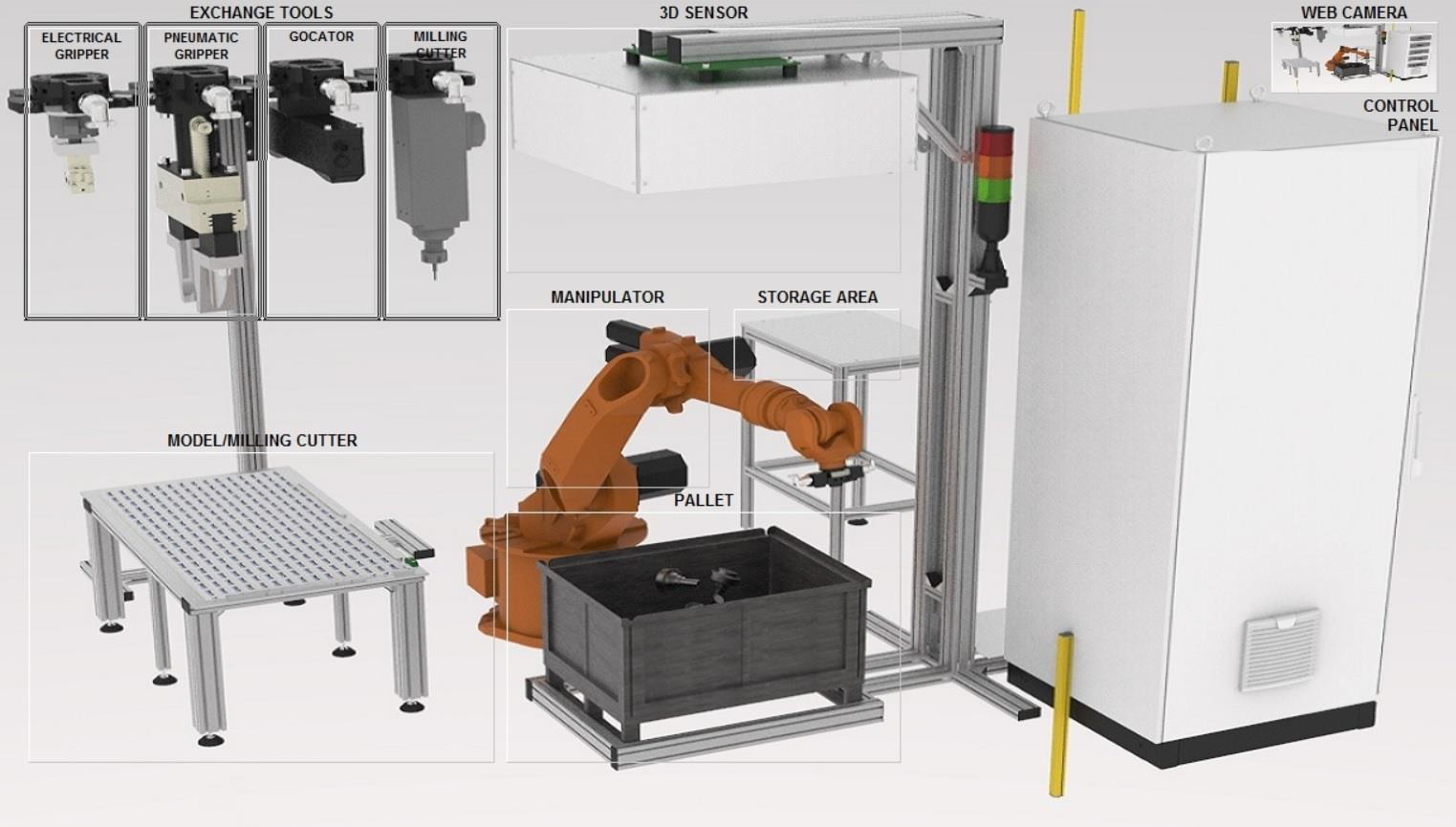
An integrated robotic workstation whose function is the fully automatic and adaptive control of robotic manipulators in integration with three-dimensional (3D) robotic vision. The workstation includes a patented robotic vision module for real-time 3D space processing, with fully automatic gripper exchange and robotic manipulator trajectory planning.
Activities performed
- PLC programming
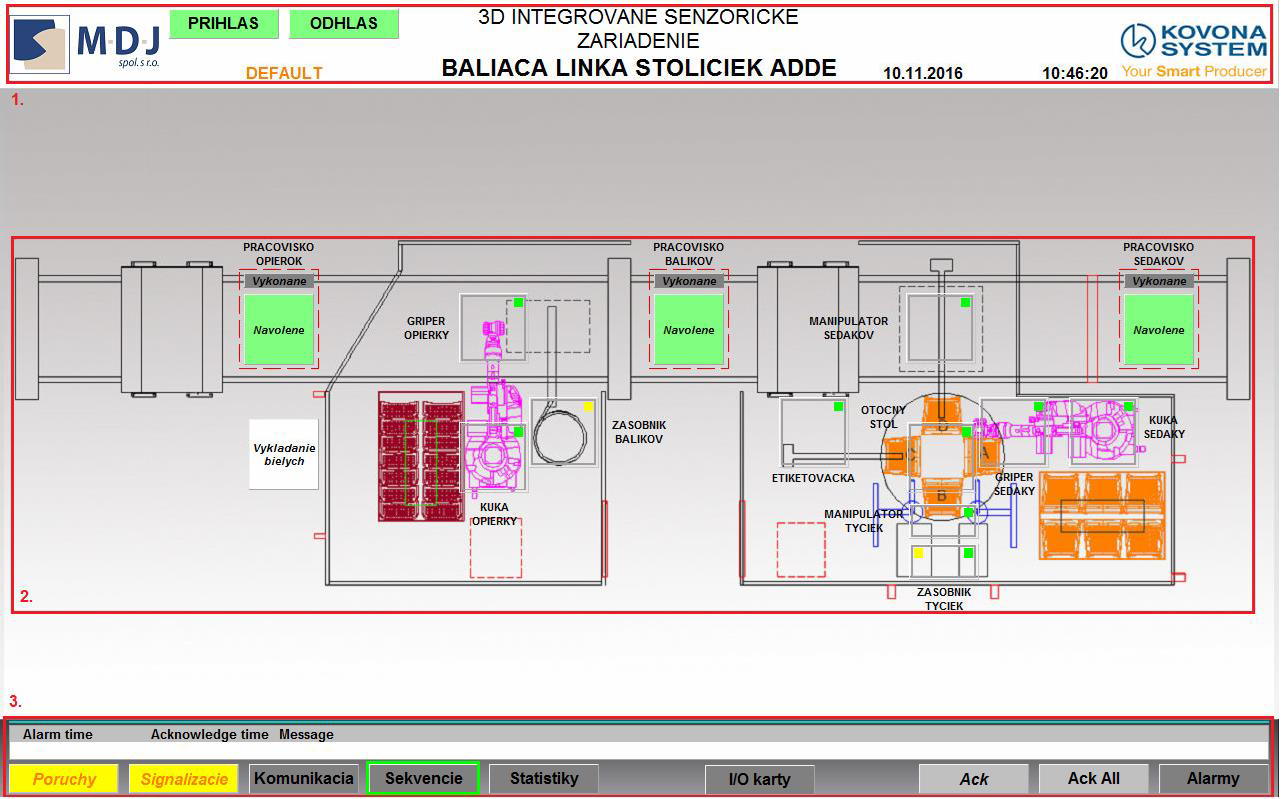
- HMI programming
- Robot programming
- Programming of 3D localization system
- Machine design and implementation
- Electrical design and implementation
- Manipulator setup and programming
- Design and manufacture of parts feeders
DESCRIPTION OF THE SOLUTION
Depalletization of components for a packaging line at an average clock speed of 7s.
Position 1:
Unloading of the chair seats is solved with the SPACEYE depalletising system using the KUKA robot. The system evaluates in 3D the position of the part. The robot removes the seat cushion and places it on an intermediate position - the turntable.
Position 2:
The manipulator removes the tubes from the feeder and inserts them into the seat on the turntable.
Position 3:
The manipulator takes the seat cushion from the turntable and places it on the belt.
Position 4:
Sorter and handler for storing packets of fasteners. Packets of fasteners are loaded into the sorter (by the line operator). The sorted packages are placed on the belt.
Position 5:
KUKA robot with SPACEYE depalletizing system for unloading the backrests. The system evaluates in 3D the position of the part. The robot removes the backrest from the pallet.
Overall assembly of the integrated robotic workstation:
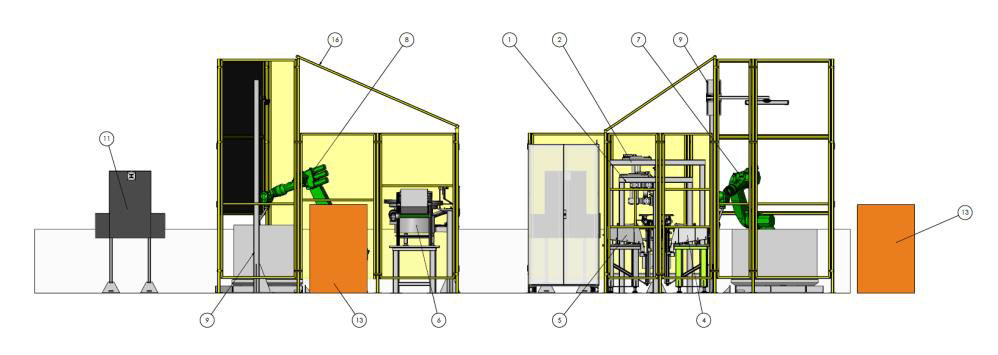
Overall assembly of the integrated robotic workstation:

APPLICATION AREAS
- Depalletisation of components
DESCRIPTION OF THE SOLUTION
Robotic workstation communication scheme:
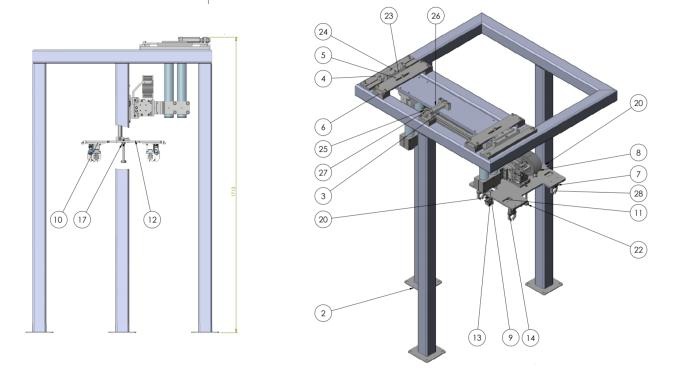
Rotary table assembly:

Manipulator / Crosstube:
DESCRIPTION OF THE SOLUTION
SPACEYE
A system for industrial use in the field of depalletization, i.e. the automated unloading of randomly arranged objects from a pallet/box. Its task is to create a 3D model of a given object, scan the pallet/work space and determine the position and rotation of the object. This information is then used by the manipulator to correctly grasp and move the object.
Features:
- Creation of a 3D model using an automated system of a rotating surface and cameras or other sensors. The output is a 3D model in the form of a point cloud of the registered object
- Retrieval of the point cloud from the search area. A point cloud represents a set of coordinates of points in 3D space. Each point is associated with a coordinate (x, y, z). It can be obtained using several approaches - 3D or moving 2D scanners, combination of two camera images
- The created program searches for a 3D model in the workspace. The output is the position and rotation of the model in the 3D space with a designated place for grasping the object with a manipulator. After grasping and repositioning the object, the system proceeds by re-scanning the working area and locating the model
SPACEYE integrated workplace: