


Kontaktná osoba k riešeniu:
Ing. Zdenko Hušek, zdenko.husek@mdj.sk, +421 948 376 665
Popis funkcií/riešenia
Integrované robotické pracovisko, ktorého funkciou je plne automatické a adaptívne riadenie robotických manipulátorov v integrácii s trojrozmerným (3D) robotickým videním. Pracovisko obsahuje patentovaný modul robotického videnia pre real-time spracovanie 3D priestoru, s plne automatickým výmenníkom uchopovacích systémov a plánovaním trajektórie robotického manipulátora.
Vykonané činnosti
- Programovanie PLC
- Programovanie HMI
- Programovanie robotov
- Programovanie 3D lokalizačného systému
- Strojný dizajn a realizácia
- Elektro dizajn a realizácia
- Nastavenie a programovanie manipulátora
- Návrh a výroba podávačov dielov
POPIS RIEŠENIA
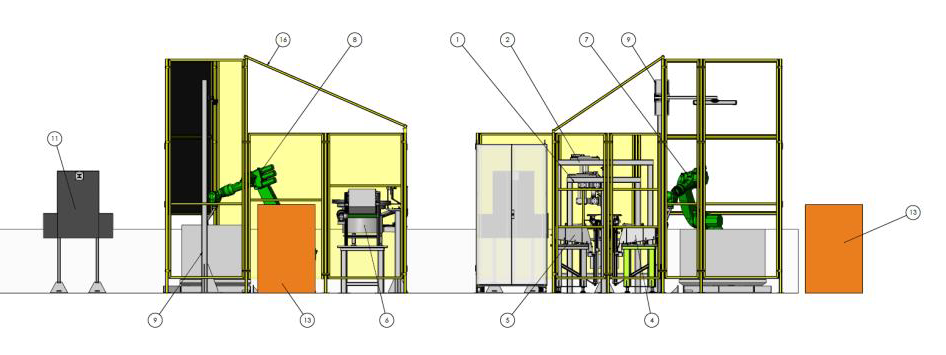
Depaletizácia komponentov pre baliacu linku v priemernom takte 7s.
Pozícia 1:
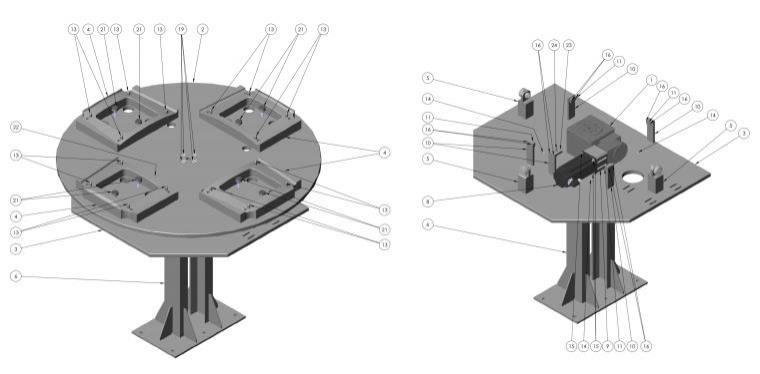
Vykladanie sedákov stoličiek je riešené pomocou depaletizačného systému SPACEYE s využitím robota KUKA. Systém vyhodnotí v 3D pozíciu dielu. Robot vyberie sedák a uloží ho na medzipozíciu – otočný stôl.
Pozícia 2:
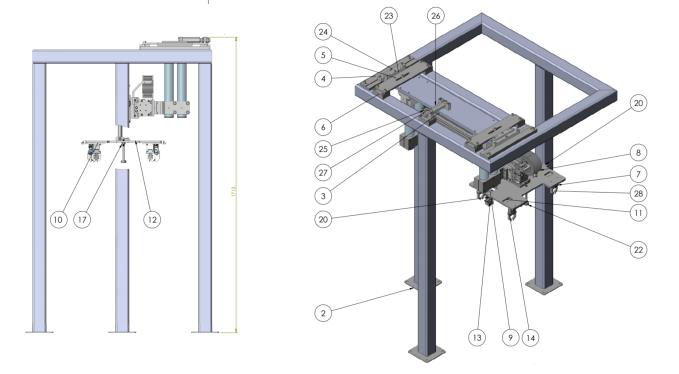
Manipulátor vyberie rúrky z podávača a vkladá ich do sedáka na otočnom stole.
Pozícia 3:
Manipulátor zoberie sedák z otočného stola a uloží ho na pás.
Pozícia 4:
Triedič a manipulátor pre ukladanie balíčkov so spojovacím materiálom. Do triediča sa nasypú balíčky so spojovacím materiálom (urobí to obsluha linky). Roztriedené balíčky sú ukladané na pás.
Pozícia 5:
Robot KUKA s depaletizačným systémom SPACEYE pre vykladanie opierok. Systém vyhodnotí v 3D pozíciu dielu. Robot vyberie operadlo z palety.

APLIKAČNÉ OBLASTI
- Depaletizácia komponentov
POPIS RIEŠENIA
Komunikačná schéma robotického pracoviska

POPIS RIEŠENIA
SPACEYE
Systém pre priemyselné využitie v oblasti depaletizácie, teda automatizovaného vykladania náhodne usporiadaných predmetov z palety/boxu. Jeho úlohou je vytvorenie 3D modelu daného predmetu, snímanie palety/pracovného priestoru a určenie pozície a natočenie predmetu. Tieto informácie následne slúžia manipulátoru pre správne uchopenie a premiestnenie daného objektu.
Funkcie:
- Vytvorenie 3D modelu pomocou automatizovaného systému otočnej plochy a kamier, resp. iných senzorov. Výstupom je 3D model vo forme mraku bodov registrovaného predmetu
- Získanie mraku bodov (point cloud) z hľadanej oblasti. Mrak bodov predstavuje množinu súradníc bodov v 3D priestore. Každému bodu prislúchajú súradnice (x, y, z). Jeho získanie je možné využitím viacerých prístupov – 3D alebo pohyblivé 2D skenery, kombinácia obrazu dvoch kamier
- Vytvorený program vyhľadá 3D model v pracovnom priestore. Výstupom je pozícia a natočenie modelu v 3D priestore s určeným miestom pre uchopenie objektu pomocou manipulátoru. Po uchopení a premiestnení objektu pokračuje systém znova zosnímaním pracovnej oblasti a vyhľadaním modelu
